A commercial collaboration with Speedshield Technologies.
Overbalancing is one of the most common causes of forklift accidents and the skill of the operator plays a crucial role in recognising that the ‘tipping point’ is near. However, a new joint-venture research project aims to improve the safety of operations by providing operators with more assistance in the form of greater automation of their equipment.
The project is a collaboration involving the University of Melbourne’s Department of Mechanical Engineering and Speedshield Technologies, which specialises in telemetry systems for a diverse range of transport vehicles.
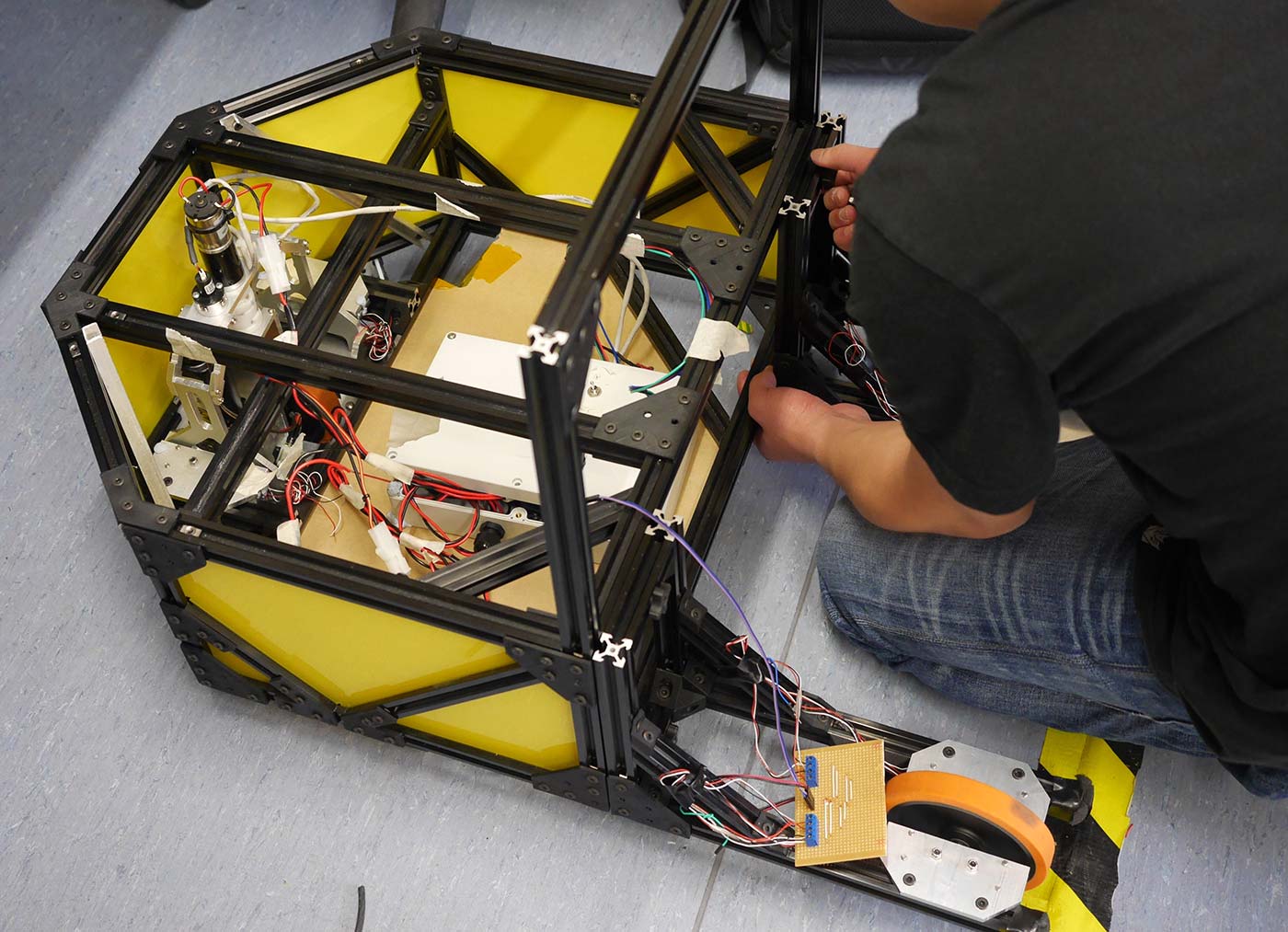
A miniature forklift is used in balance and transit simulations. The picture shows a small 3 wheeled vehicle, without any 'forks' attached. The right side (where you can see the orange wheel, is the front of the vehicle. The front wheels are unpowered. The left side where you can see a black cylinder mounted on a silver metal frame (with wires) is the rear wheel, which is powered. The grey box where all the wires are leading to (in the center) is where the processor is and other electronic components. On the right is Sai Yee Tse who was working on the little board you can see dangling near the wheel. Photo by Ben Vongchanh.
Research student Ben Vongchanh has been modelling the dynamic balance of forklifts as part of his Masters degree in Mechanical Engineering at the University of Melbourne, as a key component of the collaborative project.
The overall aim is to develop an automation system that can be retrofitted to existing forklifts,
Mr Vongchanh says. This would provide a middle ground between manually operated forklifts and expensive, fully automated robotic systems, such as Kiva, where the automation is part of the warehousing infrastructure.
Mr Vongchanh’s modelling identified when a forklift was nearing the point of toppling. He says the information could be incorporated into a visual feedback system to improve operator awareness. He also simulated an algorithm that allows the forklift to generate its own path from point A to point B. While an operator provides the initial instructions, the automated system must move the forklift to the required location, collect the load, and transport it to the destination.
The dynamic balance and transit simulations were based on the widely used electric three-wheeled forklift used in large indoor warehouses. These have a reach of up to seven metres and carry loads of up to 1.4 tonnes, operating in narrow passages between warehouse shelving.
From computer modelling and simulations, to testing with a miniature forklift model, the project is now progressing towards vehicle trials.
